Подключение шагового двигателя к микроконтроллеру AVR ATmega16: схема и программа на С
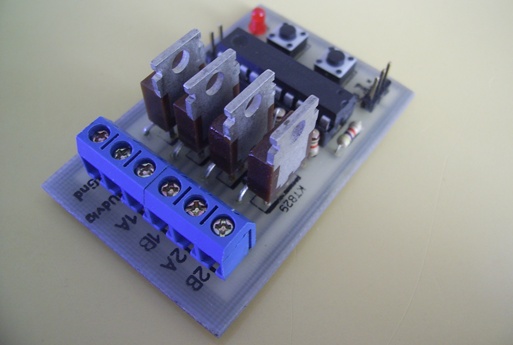
А, еще в схеме, как я тут недавно понял, надо добавить 4 диода от земли к каждому выводу каждой обмотки. Еще надо реализовать характеристику разгона: что бы переключение обмоток не слишком, а оптимально опережало вращение ротора. На обмотки ставил КТ коллекторами на обмотки, базами, через резисторы, на контроллер, эмиттерами не землю. Общий вывод двигателя на плюс питания!








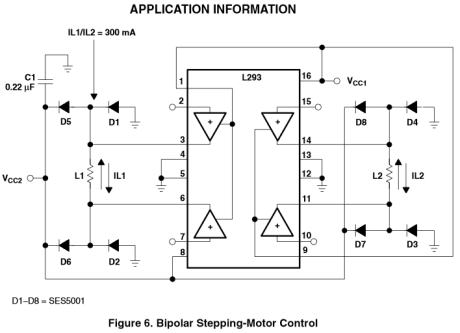

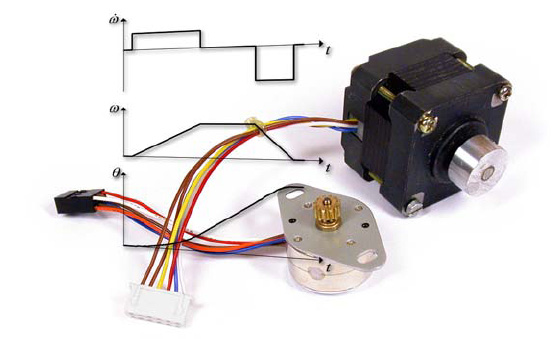
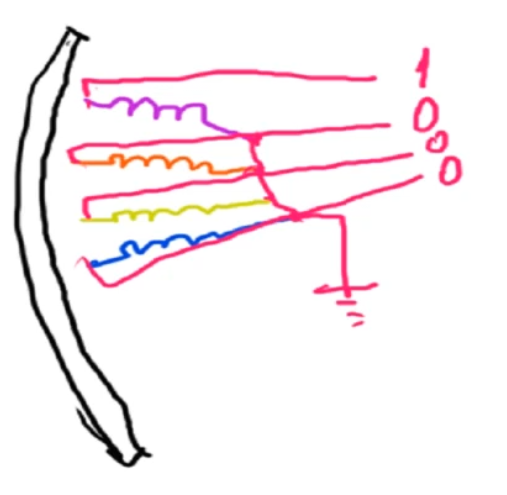
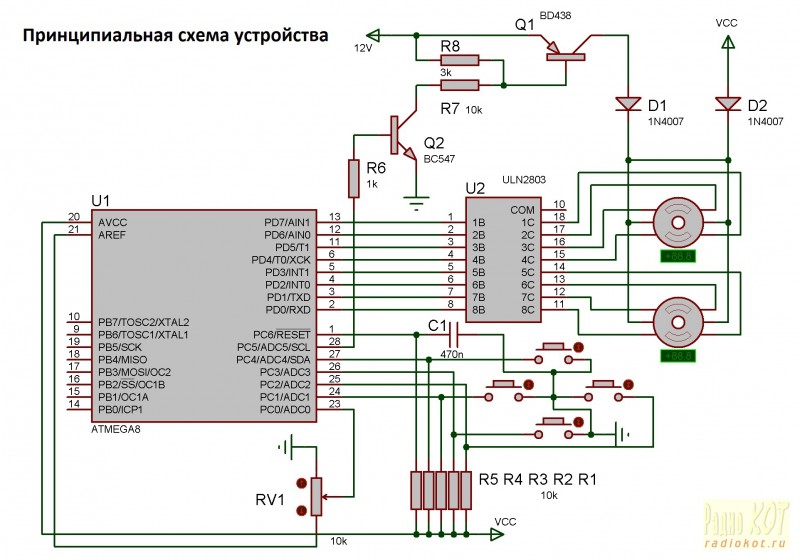
Когда хочется чего-то более существенного чем просто помигать светодиодами, и когда усвоены основы работы с микроконтроллером можно переходить к более серьёзным проектам. Предлагаю научится управлять шаговым двигателем, той штукой, которая стоит во всех принтерах, копирах, дисководах, и многих других разнообразнейших устройствах. Шаговые двигатели делятся на два типа: - униполярные шаговые двигатели, - биполярные шаговые двигатели. Отличатся немного по строению и по системе управления. Униполярный шаговый двигатель, принципиальная схема показана на рис.






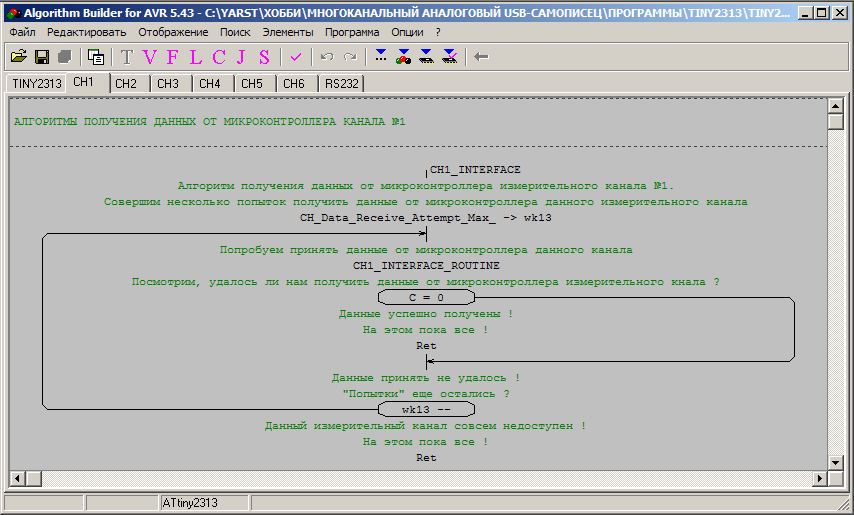
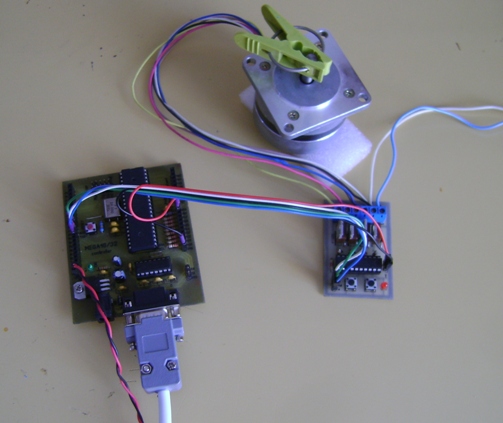
Отправляем необходимую команду и контроллер начнет вращать вал двигателя, после того как совершено необходимое количество шагов, контроллер выдаст команду "OK! Представляю вашему вниманию доработанную программу управления униполярным шаговым двигателем к контроллеру описанному в прошлой статье. Для связи с COM-портом компьютера использовал свою отладочную плату с мегой32, так как на ней установлен конвертер уровней max Порядок вывода комментариев: По умолчанию Сначала новые Сначала старые. Ну почему же - даже на бейсике есть микрошаг, но рассыпухи много и геморроя тоже. А вот контроллер на подвергся доработке согласно даташитам и инфы с разных форумов.